AT 409: Field Report Week 9
Aaron Varnau, Treston Russell, Tristan Bungen
Mission Statement:
Crew 3 will use our knowledge, attention to detail, and teamwork to successfully complete this mission to the best of our abilities.
Mission Purpose:
The purpose of our weekly flights is to monitor and record the changes that happen to the trees in the Northwest and Northeast plots at Martell. This research is being done to assist the Purdue Agricultural department and their research. This research is also being done to show the usefulness of the UAS department and give the department a strong reputation for great research. Other research is being conducted to help a graduate student William Weldon with his research thesis on finding missing persons.
Mission Location Summary:
Martell Forest was acquired to provide research and outdoor lab teaching opportunities close to the West Lafayette campus. It is named for Dr. Eldred R. “Shorty” Martell, who was head of Purdue's Department of Forestry and Conservation, now known as the Department of Forestry and Natural Resources, from 1940 to 1957. It was originally called Shidler Forest after the family the land was acquired from. Throughout its history, the forest has been central to the education of hundreds of natural resource professionals as well as a center for diverse research activities.
Martell Forest is the site of the John S. Wright Forestry Center; a research, teaching, and conference facility located at 1007 N 725 W, West Lafayette, Indiana.
Martell Forest is the site of the John S. Wright Forestry Center, a research , teaching and conference facility located at 1007 N 725 W, West Lafayette, Indiana.
Credited Source: https://ag.purdue.edu/fnr/Pages/propmartell.aspx
Martell Plot Maps:
 |
NE Plot
|
 |
| NW Plot |
Flight Report:
This week’s flight took place on Tuesday, the 20th of October, under the supervision of Professor Hupy. He came along to watch our process as we followed the checklist and performed our roles. The mission started out rocky due to us forgetting the iPad in the lab but we used the Measure app on Treston’s phone. This posed another problem due to the battery of the phone was at 65% when we started our mission. While going through the checklists we noticed the grey lines on the bolts were still not aligned properly, but we were reassured from Professor Hupy that the bolts were given the correct torque. The propeller bolt between batteries 5 and 6, that was previously stripped and replaced, did not have the grey line to align. The first flight was of the NW plot at Martell with the yellow batteries. The flight went smoothly and there were no hiccups for 21 minutes. When the M600 landed we ended the session on the PPK, and replaced the batteries. After replacing the batteries the aircraft was ready for the next flight. As we were preparing for the second flight the cell phone gave a low battery warning of 20%. This was cause for concern, so we set the phone in low power mode and started the second flight over the NE plot. At 11:40 we started the flight over the NE plot with the tan batteries for a 24 minute flight that ended early, due to the low battery of the phone. The flight finished with the cell phone battery at 2%, but the return home after was conducted in manual control of our PIC. We decided this was best so the phone didn’t die, and we’d be faced with problems of losing control of the M600. This must have been a great day to fly because we saw three aircraft fly close to our airspace. We got the data we needed with the extra amount of overlap designed in the flight plan. After we packed up and returned to the lab, we checked all of the equipment back in and Tristan went into the computer lab to process the data.
Class Meeting Summary:
This week’s lab was short in the field due to professor Hupy wanting to have a class meeting about class communication, M600 condition status, and the direction of the class when winter sets. Poor class communication led to this meeting, and gave the class a good idea as to how to continue the rest of the semester with better communication. As a class we decided that we would use Microsoft Teams for a good flow of communication with announcements and comments. We shared a Microsoft Calendar with the class, and use that to schedule times for flight crews to fly. We, as a class, decided to create a Groupme group chat to be sure everyone is notified of scheduled flights, announcements, and any problems that arise in the field.
Crew Roles and Summary:
Tristan (Submitter): My role was simple, I helped with all preflight packing and cleared SD cards before leaving for Martell. During unloading I mainly focus on all the checklists regarding the top sensor, forward sensor, and the A6000. I made sure all SD cards were inserted, PPK was set, and the A6000 was formatted correctly. My job during the flights is to write down metadata, notes of the flight, and any aircraft sightings I may see. After the mission is accomplished I help with packing up the M600 and extracting the SD cards. When we return to NISW I Head straight to the computer lab for extraction and data processing. I extract all flight data from the SD cards and put them in the proper folder template. After all the data is extracted, it is deleted off the SDd cards clearing them for the next flight crew. I then process the data using EZ Surv, and enter the meta data for each flight. Lastly, I return the SD cards to their proper places and make sure all other equipment is where it belongs before leaving.
Aaron (PIC): I make sure that the flights are conducted safely and smoothly. I arrive at COMP101 early and prepare all the equipment for our operations, and run through the checklists as we set up the M600 at Martell. I verbalize each step as we go through them and wait for responses from my crewmates so we can have efficient operations with clear communications. I put the iPad, transmitter, and Measure together and operate the transmitter and aircraft from takeoff to landing. During the flight I monitor Measure and the battery life of all equipment, most notably the M600. Sometimes flights are cancelled early due to falling battery power and I have to decide if this step is necessary. I have the final call if something goes wrong in flight and have had to make hard choices about flights in the past. After manually landing the aircraft it is up to me to announce that the aircraft is safe to approach and begin taking down. Communication is one of the most important parts of being PIC and I frequently have to call out the current battery life of the M600 and ask the visual observer if the aircraft is stable when Measure lags behind.
Treston (Visual Observer): I watch the M600 as it flies and note any odd movements or behaviors during the flight. When we hear them, I note the position of any manned aircraft as an approximate distance, altitude, and compass direction relative to the M600 so the PIC can prepare to avoid them if needed. I also take notes of the weather and states of the trees as they change color. Outside of being VO, my vehicle carries the crew and equipment to and from Martell and I am a crucial part of setting up the M600 as the sensor operator works with the A600 and XT2 and the PIC sets up the transmitter and reads the checklist.
Pictures:
Offset bolts in the M600 propellers








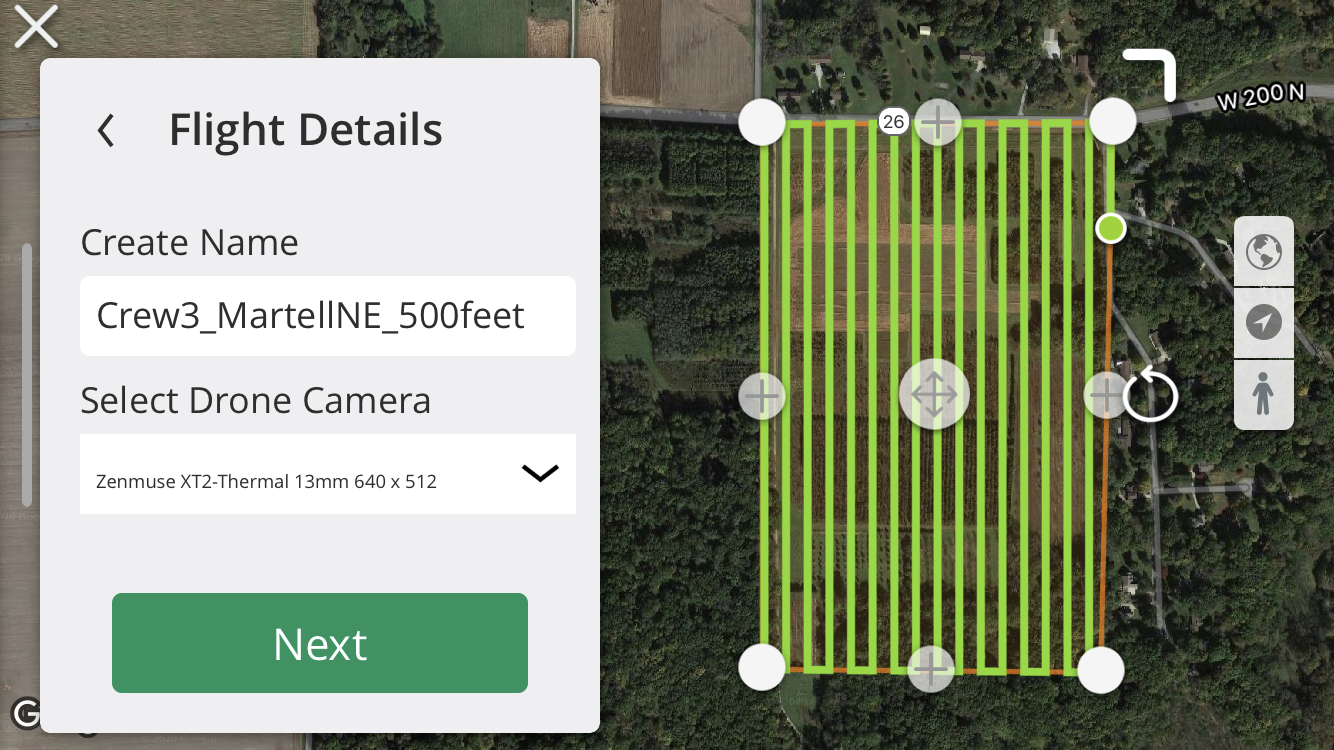
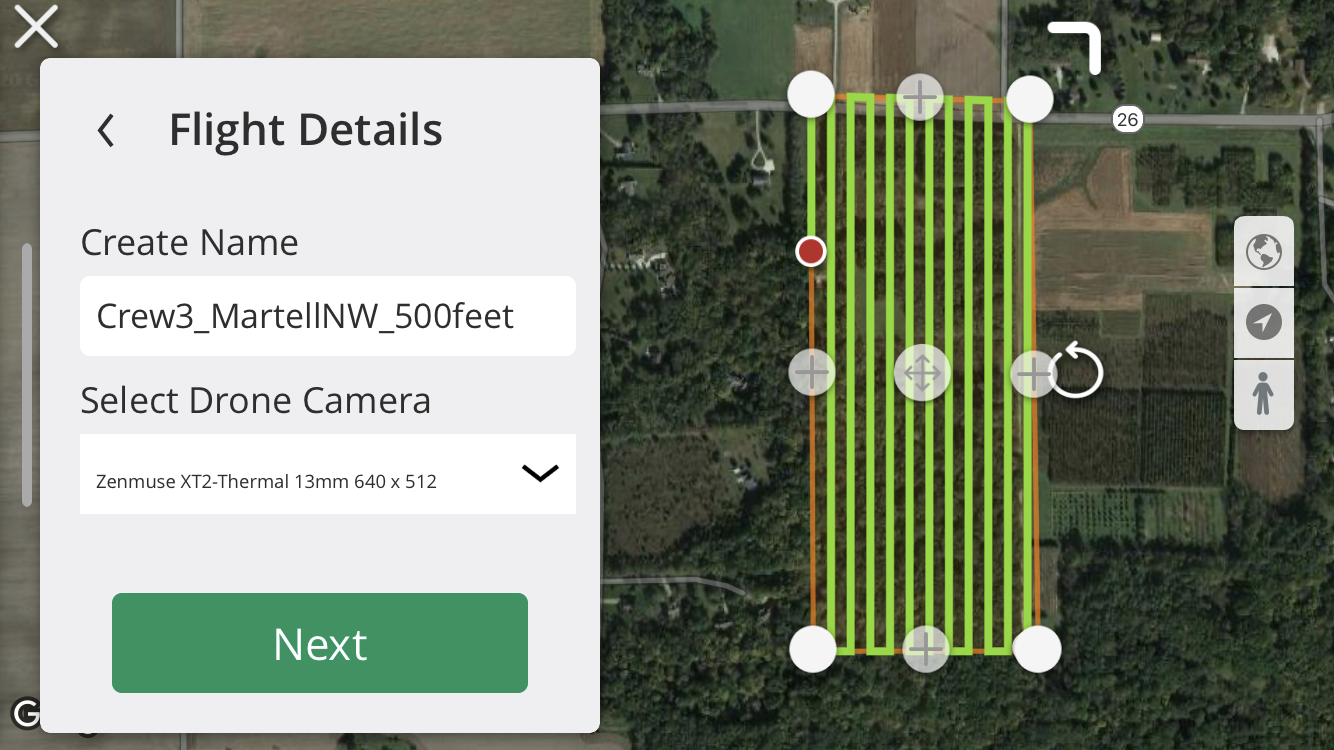
Measure, as seen during a flight. The white circles indicate where an XT2 image was taken, and the green lines indicate how much of the grid still must be flown. Some metadata is available on the side.

GeoSnap PPK attached to the top of the M600

M600 batteries in their case

Meta Data:
General
------------------
Location: Martell Forest
Date: 10/20/20
Vehicle: M600
Sensor: XT2, Zenmuse, A6000
Approval: NA
Flight Information
-------------------
Flight Number/Plot: 1 / NW Plot
Battery: Yellow
Takeoff Time: 11:12 AM
Landing Time: 11:33 AM
Altitude (m): 152m
Sensor Angle: NADIR
Overlap: 75%
Sidelap: 75%
Loss of RC: RTH
Shutter Speed: 1/3200
Aperture: F3.5
Iso Setting: Auto
Dial Setting: Shutter Priority
Lens Setting: Infinity Focus, F-3.5
Notes: We forgot the Ipad and used Treston’s cell phone for the Measure app. Phone battery got critically low during the NE plot so we turned off the screen to save battery. Phone did not die and was only dying quickly due to the cold weather. Battery got low on the NE flight so we had to manually land the M600. We switched flight modes from A to F and used the switch to manually lower the landing gear. Other than that both flights were successful and adequate data was collected.
Flight Number/Plot: 2 / NE Plot
Battery: Tan
Takeoff Time: 11:40 AM
Landing Time: 12:04 PM
Altitude (m): 152m
Sensor Angle: NADIR
Overlap: 75%
Sidelap: 75%
Loss of RC: RTH
Shutter Speed: 1/3200
Aperture: F3.5
Iso Setting: Auto
Dial Setting: Shutter Priority
Lens Setting: Infinity Focus, F-3.5
Notes: We forgot the Ipad and used Trestons cellphone as a measure device. Phone battery got critically low during the NE plot so we turned off the screen to save battery. Phone did not die and was only dying quickly due to the cold weather. Battery got low on the NE flight so we had to manually land the M600. We switched flight modes from A to F and used the switch to manually lower the landing gear. Other than that both flights were successful and adequate data was collected.
Weather: Overcast, Cloudy, Calm, Good Lighting
------------------
Coordinate System: NAD83 (2011) / UTM Zone 16N
Metar:
KLAF 201454Z 04008KT 10SM OVC070 09/06 A3025 RMK A02 SLP 244 T00890056 50011
Temp: 48 degrees
Humidity: 80%
Precipitation: 15%
Clouds: Yes, Overcast
Wind: 9 mph
Crew
------------------
PIC: Aaron Varnau
VO: Treston Russell
Submitter: Tristan Bungen
Aircraft Sightings:
3 aircraft spotted preflight, twin prop - low alt
Aircraft spotted south 2nd leg, NW plot
SUV drove down the road mid flight
Aircraft spotted south 12th leg NE plot